Цифровой журнал «Компьютерра» № 76 [Журнал «Компьютерра»] (fb2) читать постранично, страница - 3
- Цифровой журнал «Компьютерра» № 76 (а.с. Журнал Компьютерра -76) 4.73 Мб скачать: (fb2) - (исправленную) читать: (полностью) - (постранично) - Журнал «Компьютерра»
[Настройки текста] [Cбросить фильтры]
- 1
- 2
- 3
- 4
- 5
- . . .
- последняя (36) »
была захватить в объективы небольшой участок видимой с Земли поверхности нашего спутника, чтобы у ученых появилась возможность выполнить топографическую привязку местности к известны ориентирам.





В процессе фотографирования система ориентации «Чайка» постоянно удерживала движущуюся станцию кормой к Солнцу
Корпус станции при подлете к точке съемки вращался вокруг ее центра масс с периодом 165 секунд. Эти измерения, выполненные гироскопическими сенсорами "d", позволили задействовать все восемь микродвигателей, практически остановив (погрешность 0,15 градуса в секунду) кувыркание станции по всем трем осям. Гироскопы при этом выполняли роль балансиров, демпфирующих в отсутствии трения действие двигателей ориентации. Этот маневр занял около десяти минут. После остановки вращения в дело вступили солнечные сенсоры на днище «Луны-3» и вокруг ее объективов. Компьютер, начал подавать управление двигателям V1-V4 таким образом, чтобы максимизировать сигналы сенсоров "S" на днище, и одновременно минимизировать сигналы сенсоров "В" возле объективов. Этот маневр, длившийся около тридцати минут, развернул станцию объективом в сторону Луны, а днищем — к Солнцу.
Точно направить объективы камер на Луну «Чайке» позволила дружная работа гироскопов, солнечных и лунного сенсоров
Нужная ориентация корпуса была получена и постоянно корректировалась с учетом траектории движения центра масс станции. Точно нацелиться на Луну объективам фотоаппаратов позволила информация от сенсора, улавливавшего лунный. Максимизируя его сигналы, компьютер скорректировал положение люка, скрывающего фотоаппаратуру «Луны-3» с погрешностью в 0,5 градуса.
Такое положение по отоношению к Луне заняла станция после завершения маневров ориентации
Так выглядит Луна, пойманная в объектив фотокатеры «Луны-3»
Кроме того, непосредственно перед съемкой «Чайка» придала станции кратковременное вращательное движение вдоль оси съемки, чтобы солнечные лучи равномерно прогрели ее корпус, и процессы химической обработки полученных снимков прошли без проблем."Луна-3". Начало эпохи управляемых полетов
Полученные «Луной-3» снимки обратной стороны Луны были не ахти какого качества. Это и понятно — сделанные на обычную фотопленку, они проявлялись прямо на борту станции, да и аппаратура их телепередачи методом бегущего луча (того самого, что применяется в современных сканерах) только начинала свое развитие. Но все это было не важно. Полет «Луны-3» и выполненная ею на «пятерку» фотосессия земного спутника, во второй раз после запуска «Спутника-1» произвели эффект разорвавшейся бомбы. Шутка ли — в то время, как после ряда неудачных запусков микроспутников (Хрущев за маленький вес называл их «грейпфрутами») американского проекта "Авангард", 18 сентября 1959 года США успешно запускают двадцатитрёхкилограмовый «Vanguard-3» на высоту восемь тысяч километров, русские 4 октября того же года отправляют к Луне целую фотолабораторию «Луна-3» весом 287 килограммов. И не просто запускают, а успешно делают и передают снимки лунной поверхности.
Отправленный на орбиту месяцем раньше американский спутник «Vanguard-3» был в десять раз меньше «Луны-3»
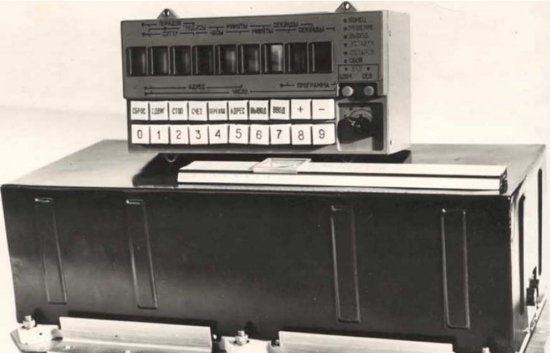
Миссия «Луны-3» подстегнула настоящую космическую гонку двух супердержав. Именно она стала причиной увеличения ассигнований на развитие космических технологий и в США и в СССР. И именно благодаря ней в США появилось агентство NASA, а теория управления ориентацией космических аппаратов вышла на новый уровень развития. Её первопроходец, система ориентации «Чайка» легла в основу множества систем управления межпланетными и пилотируемыми космическими кораблями. В лаборатории Раушенбаха в семидесятые годы были разработаны и усовершенствованы системы ориентации станций «Марс» и «Венера», системы коррекции орбиты спутников Земли, а также системы автоматического и ручного управления и стыковки пилотируемых космических аппаратов. На смену электромеханическому компьютеру «Чайки» пришли бортовые цифровые ЭВМ серии «Салют». А для ориентации над не освещенной Солнцем стороной Земли, была придумана система ИКВ — инфракрасной вертикали, сенсоры которой использовали инфракрасное излучение нашей планеты.
Бортовая цифровая ЭВМ «Салют-1» сменила
- 1
- 2
- 3
- 4
- 5
- . . .
- последняя (36) »
Последние комментарии
21 часов 2 минут назад
21 часов 19 минут назад
21 часов 31 минут назад
21 часов 37 минут назад
1 день 8 минут назад
1 день 12 минут назад